Войти
Войти Регистрация
Регистрация


Использование алгоритма "точка схода" для ориентирования робота-квадрокоптера в лабиринте
Напомню, что в этом алгоритме на картинке получаемой от робота выбираются прямые линии удовлетворяющие условию
angle1 < fabs(m) < angle2
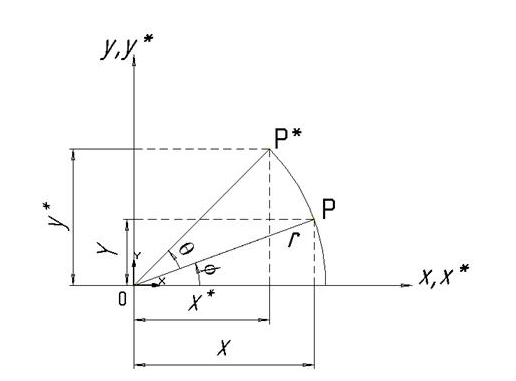
где m = -ctg(teta), где teta это угол между прямой линией и осью х
У меня angle1 = 0.3, angle2 =10.0
То есть отбрасываются линии которые близки к горизонтальным и вертикальным направлениям на картинке
В результате обработки картинки получаем так называемую "точку схода". Ее положение на картинке можно использовать для контроля направления зрения камеры относительно стенок лабиринта
Если х-координата "точки схода" совпадает с центром картинки, то камера параллельна стенкам лабиринта
Измерив углы линий создающих "точку схода" можно определить положение робота относительно стенок лабиринта. Если углы по абсолютной величине равны, то робот находится посередине коридора
 Наверх
Наверх